
- Co je krokový motor?
- Zařízení a princip činnosti
- Typy krokových motorů
- Připojení krokového motoru
- Ovládání krokového motoru
- Nejjednodušší krokový motor řidiče to dělá sám
- Užitečné video
Pomozte vývoji webu a sdílení článku s přáteli!
Pro provoz prakticky všech elektrických zařízení jsou zapotřebí speciální pohonné mechanismy. Navrhujeme zvážit, co je to krokový motor, jeho design, princip činnosti a schémata zapojení.
Co je krokový motor?
Krokový motor je elektrický stroj navržený přeměnit elektrickou energii sítě na mechanickou energii. Konstrukčně se skládá ze statorových vinutí a magneticky měkkého nebo magneticky tvrdého rotoru. Charakteristickým znakem krokového motoru je diskrétní rotace, při které určitý počet pulzů odpovídá určitému počtu dokončených kroků. Taková zařízení jsou nejčastěji používána na CNC strojích, robotice, úložištích informací a čtecích zařízeních.
Na rozdíl od jiných typů strojů se krokový motor neotáčí plynule, ale v krocích, ze kterých přichází název zařízení. Každý takový krok je pouze částí jeho celkového obratu. Počet kroků potřebných pro úplné otáčení hřídele se bude lišit v závislosti na schématu zapojení, značce motoru a způsobu řízení.
Výhody a nevýhody krokového motoru
Výhody provozování krokového motoru zahrnují:
- U krokových motorů úhel natočení odpovídá počtu použitých elektrických signálů, zatímco po zastavení otáčení je zachován plný moment a fixace;
- Přesné polohování - poskytuje 3 - 5% nastaveného kroku, který se od kroku k kroku neakumuluje;
- Poskytuje vysokorychlostní start, reverz, stop;
- Odlišuje se ve vysoké spolehlivosti díky absenci třecí komponenty pro sběr proudu, na rozdíl od motorů kolektorů;
- Pro umístění krokového motoru nevyžaduje zpětnou vazbu;
- To může produkovat nízké otáčky pro přímo aplikované zatížení bez převodovek;
- Relativně nižší náklady ve srovnání se stejnými servy;
- Poskytuje široký rozsah otáček hřídele regulace otáček změnou frekvence elektrických impulsů.
Nevýhodami použití krokového motoru jsou:
- Může existovat rezonanční efekt a prokluzování krokové jednotky;
- Existuje možnost ztráty kontroly z důvodu nedostatečné zpětné vazby;
- Množství spotřebované elektřiny nezávisí na přítomnosti nebo nepřítomnosti zátěže;
- Komplexnost řízení vzhledem k danému okruhu
Zařízení a princip činnosti
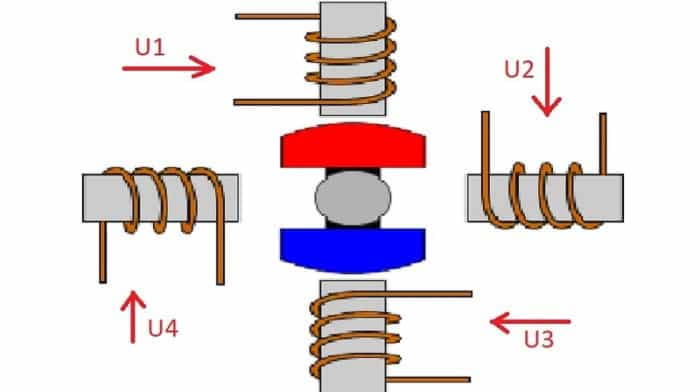
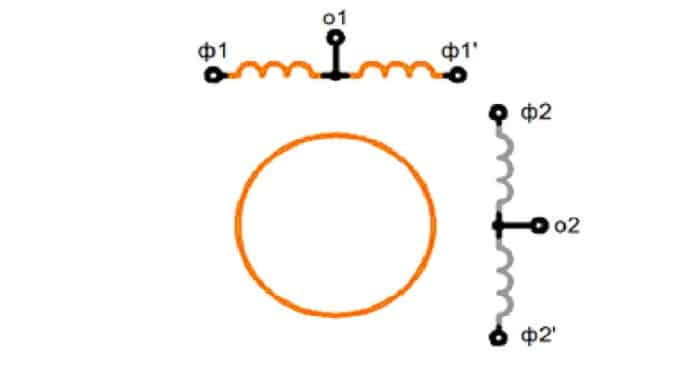
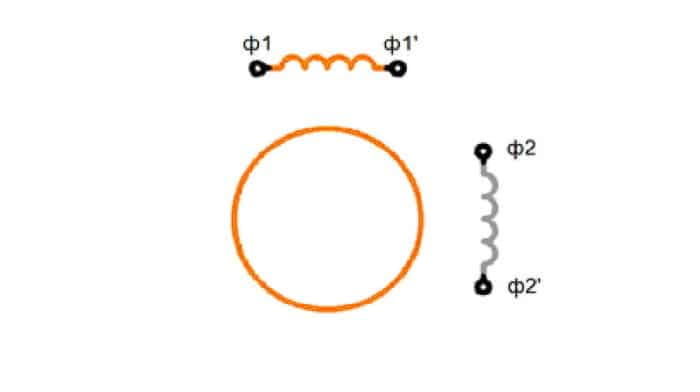
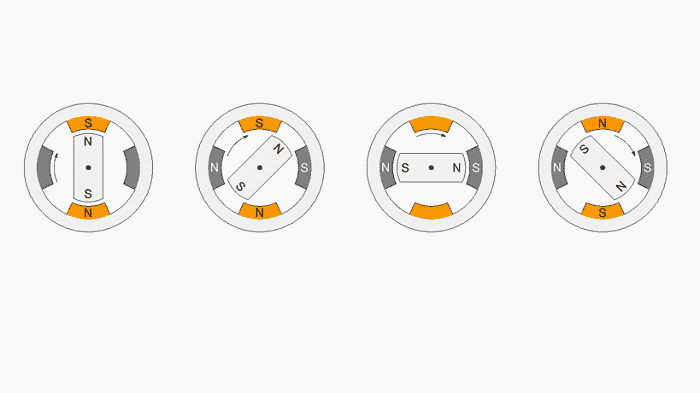
Obrázek 1 ukazuje 4 vinutí, která se týkají statoru motoru, a jejich uspořádání je uspořádáno tak, že jsou vůči sobě navzájem v úhlu 90 °. Z toho vyplývá, že takový stroj se vyznačuje velikostí kroku 90 °.
V okamžiku, kdy je napětí U1 přiváděno do prvního vinutí, se rotor pohybuje na stejné 90 °. V případě střídavého přivádění napětí U2, U3, U4 na příslušné vinutí bude hřídel pokračovat v otáčení až do dokončení celého kruhu. Poté se cyklus opakuje. Pro změnu směru otáčení stačí změnit pořadí, ve kterém jsou impulsy přiváděny na odpovídající vinutí.
Typy krokových motorů
Pro zajištění různých parametrů práce je důležitá jak velikost kroku, kterým se hřídel pohybuje, tak i okamžik použitý pro pohyb. Varianty těchto parametrů se dosahují konstrukcí samotného rotoru, způsobem připojení a konstrukcí vinutí.
Konstrukce rotoru
Rotující prvek zajišťuje magnetickou interakci s elektromagnetickým polem statoru. Proto jeho design a technické vlastnosti přímo určují způsob provozu a parametry otáčení krokové jednotky. Aby bylo možné v praxi určit typ krokového motoru, s odpojenou sítí, je nutné hřídel otočit, pokud cítíte odpor, znamená to přítomnost magnetu, jinak je to konstrukce bez magnetického odporu.
Reaktivní
Reaktivní krokový motor není vybaven magnetem na rotoru, ale je vyroben z měkkých magnetických slitin, zpravidla je sestaven z desek pro snížení indukčních ztrát. Konstrukce v průřezu připomíná ozubené kolo se zuby. Póly vinutí statoru jsou poháněny protilehlými páry a vytvářejí magnetickou sílu pro pohyb rotoru, která se pohybuje od střídavého proudění elektrického proudu v párech vinutí.
Vážnou výhodou tohoto provedení krokového pohonu je nepřítomnost západkového momentu, který je tvořen polem ve vztahu ke svítidlu. Ve skutečnosti se jedná o stejný synchronní motor, ve kterém se rotor otáčí podle statorového pole. Nevýhodou je snížení hodnoty točivého momentu. Rozteč pro proudový motor se pohybuje od 5 do 15 °.
S permanentními magnety
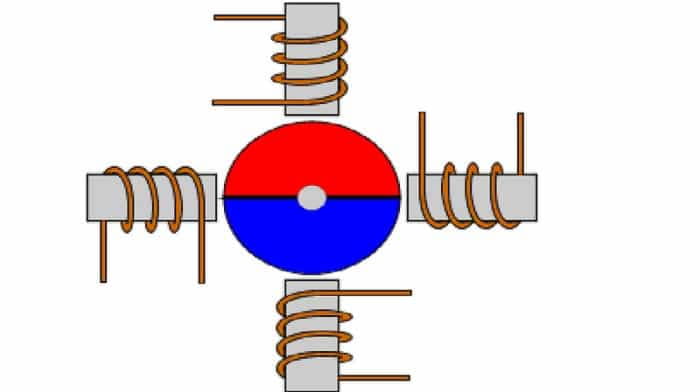
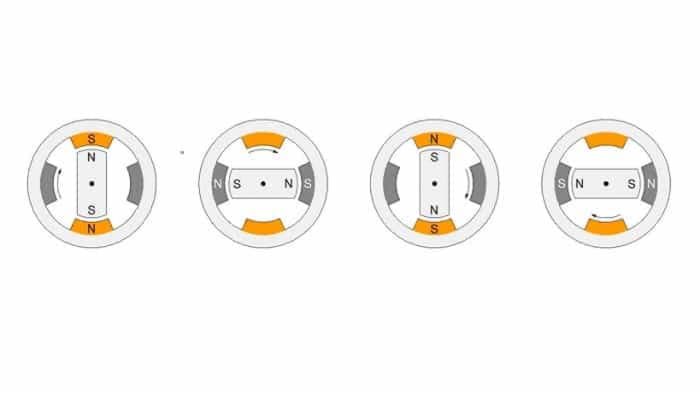
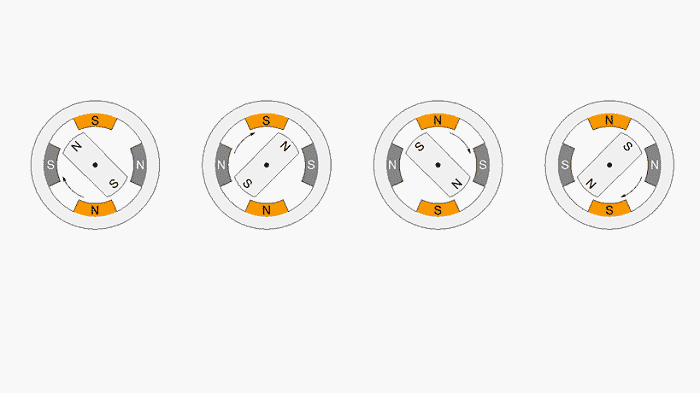
V tomto případě je pohyblivý prvek krokového motoru sestaven z permanentního magnetu, ve kterém mohou být dva nebo více pólů. Rotace rotoru je zajištěna přitažlivostí nebo odpuzováním magnetických pólů elektrickým polem, když je napětí aplikováno na odpovídající vinutí. Pro tento design je úhlová rozteč 45-90 °.
Hybrid
Byl navržen tak, aby kombinoval nejlepší vlastnosti obou předchozích modelů, díky kterým má jednotka menší úhel a stoupání. Rotor je vytvořen ve formě válcového permanentního magnetu, který je magnetizován podél podélné osy. Konstrukčně vypadá jako dva kulaté póly, na jejichž povrchu jsou zuby rotoru z magnetického materiálu. Toto řešení umožnilo vynikající držení a točivý moment.
Výhody hybridního krokového motoru spočívají v jeho vysoké přesnosti, plynulosti a rychlosti pohybu v malých krocích - od 0, 9 do 5 °. Používají se pro špičkové CNC stroje, počítačová a kancelářská zařízení a moderní robotiku. Jedinou nevýhodou je poměrně vysoká cena.
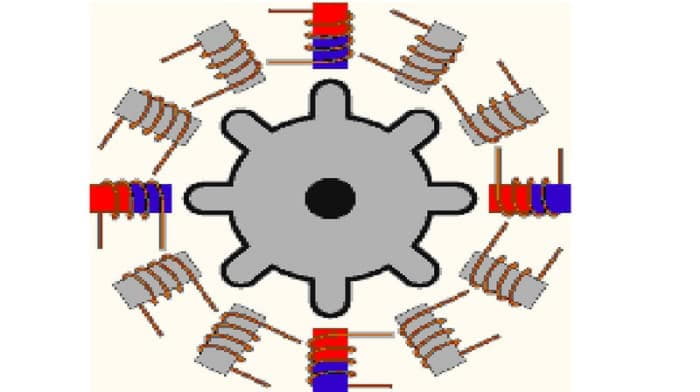
Analyzujme například variantu hybridních krokových motorů s 200 kroky polohování hřídele. Proto každý z válců bude mít 50 zubů, jeden z nich je kladný, druhý negativní. Navíc je každý kladný zub umístěn proti drážce v negativním válci a naopak. Strukturálně to vypadá takto:
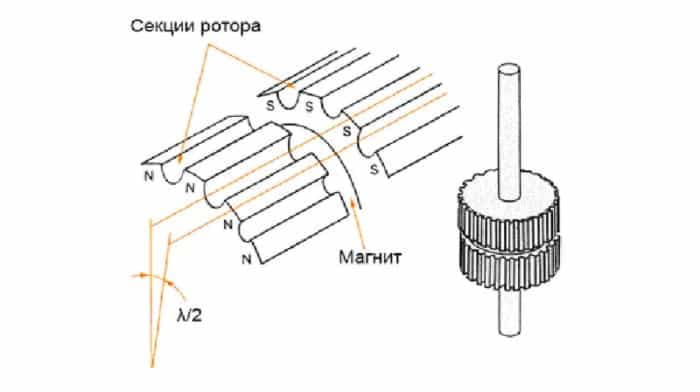
Z tohoto důvodu se na hřídeli krokového motoru získá 100 střídavých pólů s vynikající polaritou. Stator má také zuby, jak je znázorněno na obrázku 6 níže, s výjimkou mezer mezi jeho součástmi.
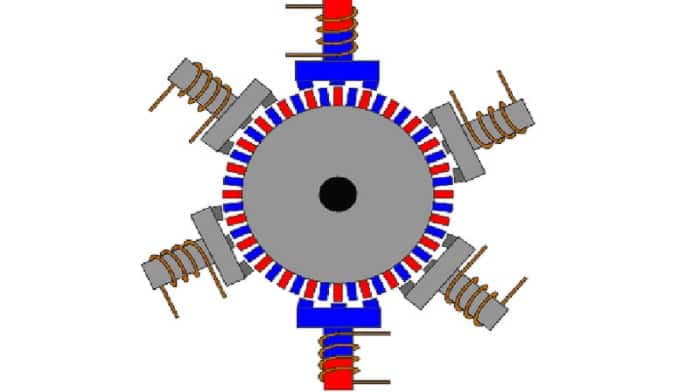
Díky této konstrukci je možné dosáhnout posunu stejného jižního pólu vzhledem ke statoru v 50 různých polohách. Vzhledem k rozdílu v polohách mezi polohou mezi severním a jižním pólem je dosaženo schopnosti pohybovat se ve 100 pozicích a fázový posun o čtvrtinu rozdělení poskytuje příležitost ke zvýšení počtu kroků v důsledku sekvenčního buzení o další dva časy, tj. Až 200 kroků úhlového hřídele na 1 otáčku.
S ohledem na obr. 6 spočívá princip činnosti takového krokového motoru ve skutečnosti, že když je do protilehlých vinutí přiváděn pár proudů, protilehlé póly rotoru umístěné za zuby statoru jsou taženy nahoru a podobně se opakují ve směru otáčení.
Podle typu vinutí
V praxi je krokovým motorem vícefázový motor. Hladkost práce, která přímo závisí na počtu vinutí - čím více z nich je, tím je rotace plynulejší, ale čím vyšší jsou náklady. V tomto případě se moment z počtu fází nezvyšuje, ačkoliv pro normální provoz by jejich minimální počet na statoru elektromotoru měl být alespoň dva. Počet fází neurčuje počet vinutí, takže dvoufázový krokový motor může mít čtyři nebo více vinutí.
Unipolární
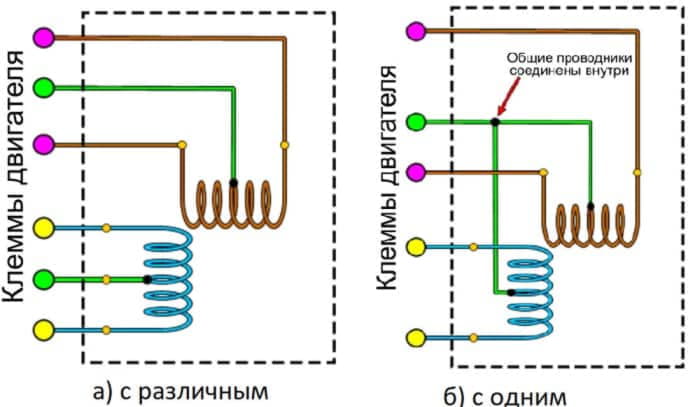
Unipolární krokový motor je odlišný v tom, že připojovací obvod vinutí má větev od středu. Díky tomu se magnetické póly snadno mění. Nevýhodou tohoto provedení je použití pouze jedné poloviny dostupných otáček, díky čemuž je dosaženo menšího krouticího momentu. Proto jsou velké.
Pro využití veškerého výkonu cívky zůstává průměrný výkon nepřipojen. Uvažujme o návrhu unipolárních jednotek, které mohou obsahovat 5 a 6 závěrů. Jejich počet bude záviset na tom, zda je střední vodič odstraněn odděleně od každého vinutí motoru nebo zda jsou spojeny dohromady.
Bipolární
Bipolární krokový motor je připojen k regulátoru přes 4 piny. V tomto případě lze vinutí zapojit dovnitř jak v sérii, tak paralelně. Zvažte příklad jeho práce na obrázku.
V konstrukčním schématu takového motoru můžete v každé fázi vidět jedno budicí vinutí. Z tohoto důvodu změna směru proudu vyžaduje použití speciálních ovladačů v elektronickém obvodu (elektronické čipy určené pro řízení). K dosažení tohoto efektu můžete použít H-můstek. Ve srovnání s předchozím, bipolární zařízení poskytuje stejný moment s mnohem menšími rozměry.
Připojení krokového motoru
Pro napájení vinutí potřebujete zařízení schopné produkovat řídicí puls nebo řadu pulzů v určité sekvenci. Jako takové jednotky slouží polovodičová zařízení pro připojení krokového motoru, ovladače mikroprocesorů. Ve kterém je sada výstupních svorek, každá z nich určuje způsob napájení a režim provozu.
V závislosti na schématu zapojení by měl být použit jeden nebo jiný závěr jednotky kroku. Při různých způsobech sčítání jednoho nebo druhého terminálu k výstupnímu signálu stejnosměrného proudu se získá určitá rychlost otáčení, stoupání nebo mikrokrok lineárního pohybu v rovině. Vzhledem k tomu, že u některých úkolů je zapotřebí nízká frekvence a u jiných vysoká, může stejný motor nastavit parametr na úkor řidiče.
Typická schémata zapojení
V závislosti na tom, kolik pinů je reprezentováno na konkrétním krokovém motoru: 4, 6 nebo 8 pinů, možnost použití jednoho nebo druhého obvodu pro jejich připojení bude odlišná, podívejte se na obrázky, zde jsou typické možnosti připojení krokového mechanismu:
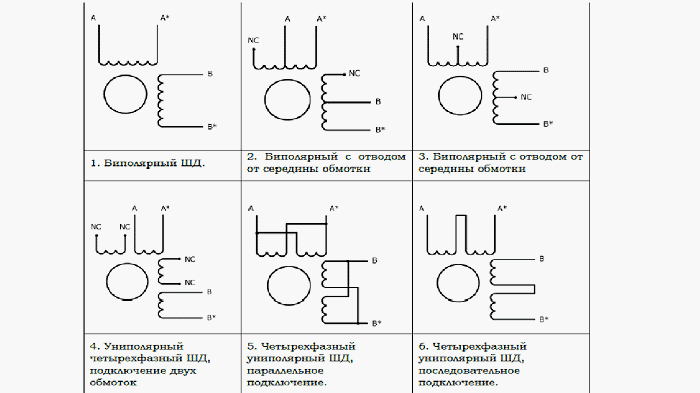
Pod podmínkou napájení hlavních pólů krokového stroje od stejného řidiče lze podle těchto schémat zaznamenat následující charakteristické rysy práce:
- Vedení jsou jedinečně připojena k odpovídajícím svorkám přístroje. Když jsou vinutí zapojena do série, indukčnost vinutí se zvyšuje, ale snižuje proud.
- Poskytuje pasovou hodnotu elektrických charakteristik. S paralelním obvodem se proud zvyšuje a indukčnost klesá.
- Při připojení jedné fáze k vinutí klesá moment při nízkých otáčkách a snižuje velikost proudů.
- Při připojení provádí všechny elektrické a dynamické charakteristiky podle pasu, jmenovitých proudů. Kontrolní schéma je značně zjednodušeno.
- Poskytuje mnohem větší moment a používá se pro vysoké rychlosti;
- Stejně jako u předchozího provedení je zamýšleno zvýšení krouticího momentu, ale používá se pro nízké rychlosti.
Ovládání krokového motoru
Činnost krokové jednotky může být prováděna několika způsoby. Každý z nich se liší způsobem, jakým jsou signály přenášeny do dvojice pólů. Celkem emituje způsob aktivace vinutí.
Wave - v tomto režimu je buzeno pouze jedno vinutí, ke kterému jsou přitahovány póly rotoru. V tomto případě není krokový motor schopen vytáhnout velké zatížení, protože vydává pouze polovinu momentu.
Plnohodnotný krok - v tomto režimu dochází k současnému přepínání fází, to znamená, že jsou oba buzeny současně. Z tohoto důvodu je zajištěn maximální moment, v případě paralelního připojení nebo sériového zapojení vinutí bude vytvořeno maximální napětí nebo proud.
Poloviční krok - je kombinací dvou předchozích metod spínání vinutí. Během provádění, ve kterém je v krokovém motoru aplikováno střídavé napětí nejprve na jednu cívku a pak na dvě najednou. To zajišťuje lepší fixaci při maximálních rychlostech a více krocích.
Pro měkčí řízení a pro překonání setrvačnosti rotoru je použito mikrokrokové řízení, když je sinusový signál prováděn mikro-krokovými pulsy. V důsledku toho síly interakce magnetických obvodů v krokovém motoru mají hladší změnu a v důsledku toho pohyb rotoru mezi póly. Umožňuje významně snížit krokové krokové motory.
Bez regulátoru
Pro řízení bezkomutátorových motorů se používá systém H-můstků. To vám umožní přepnout polaritu pro reverzní krokový motor. Může být prováděna na tranzistorech nebo mikročipech, které vytvářejí logický řetězec pro pohybující se klávesy.
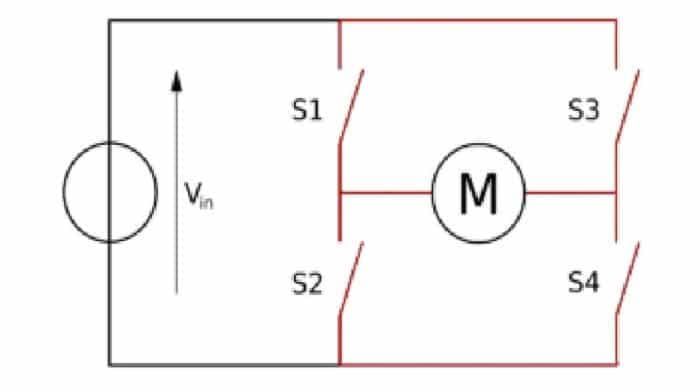
Jak můžete vidět, ze zdroje napětí V se na můstek aplikuje napětí. Když jsou kontakty S1 - S4 nebo S3 - S2 spárovány, proud bude protékat vinutí motoru. Která způsobí rotaci v jednom směru nebo jiný.
S regulátorem
Regulátor umožňuje řízení krokového motoru v různých režimech. Regulátor je založen na elektronické jednotce, která tvoří skupiny signálů a jejich posloupnost, posílaných do cívek statoru. Aby se zabránilo možnosti jeho poškození v případě zkratu nebo jiné nouzové situace na motoru samotném, je každý výstup chráněn diodou, která nevynechá puls v opačném směru.
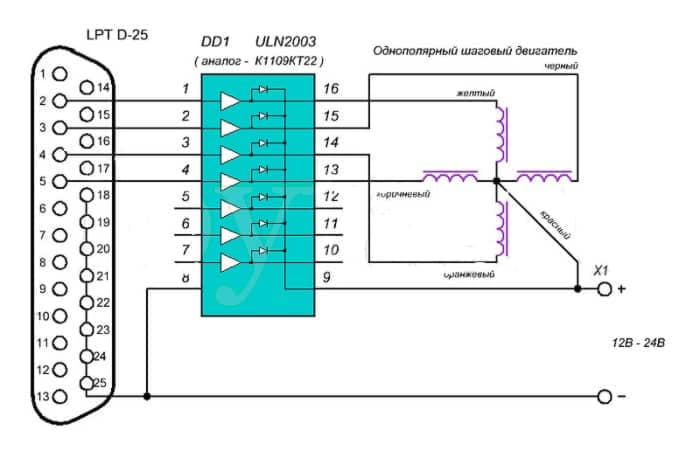
Populární schémata řízení SM
Je to jedna z nejvíce provozních metod bez rušení. V tomto případě je přímý a inverzní signál přímo spojen s odpovídajícími póly. V takovém schématu by měl být aplikován ochranný signální vodič. Perfektní pro nízký výkon.

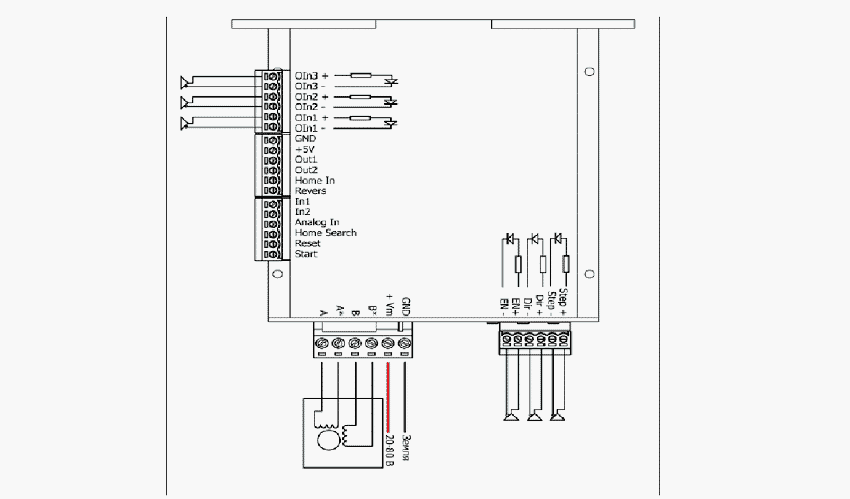
V tomto schématu jsou připojeny kladné vstupy regulátoru, které jsou připojeny k kladnému pólu. V případě výkonu nad 9V musí být do obvodu zapojen speciální odpor, který omezí proud. Umožňuje nastavit požadovaný počet kroků s přesně nastavenou rychlostí, určit zrychlení atd.
Nejjednodušší krokový motor řidiče to dělá sám
Aby bylo možné sestavit schéma řidiče doma, mohou být užitečné některé prvky ze starých tiskáren, počítačů a jiných zařízení. Budete potřebovat tranzistory, diody, rezistory (R) a mikroobvod (RG).
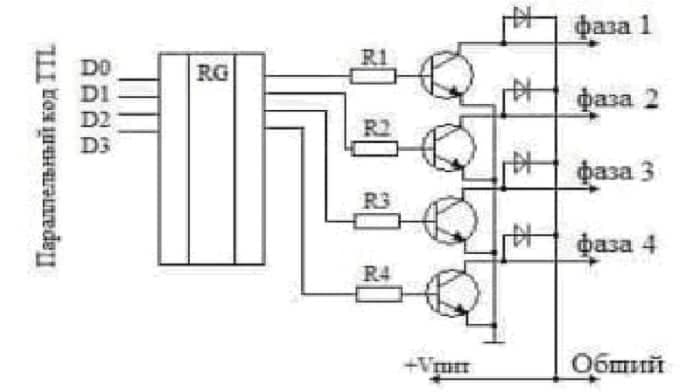
Chcete-li vytvořit program, postupujte podle následujícího principu: při použití logické jednotky na jeden z kolíků D (ostatní signál nula) se tranzistor otevře a signál přechází na cívku motoru. Provádí se tedy jeden krok.
Na základě tohoto schématu je sestavena deska s tištěnými spoji, kterou si můžete vyzkoušet sami nebo provést na zakázku. Poté jsou odpovídající části pájeny na desce. Zařízení je schopno ovládat krokové zařízení z domácího počítače připojením k běžnému portu USB.