
- Zařízení a popis DPT
- Princip činnosti
- Typy DPT
- Řízení
- Oblasti použití
- Výhody a nevýhody
- Video kromě psaného
Pomozte vývoji webu a sdílení článku s přáteli!
Éra elektromotorů sahá až do 30. let XIX století, kdy Faraday experimentálně prokázal schopnost rotace vodiče, kterým prochází proud kolem permanentního magnetu. Thomas Davenport na tomto principu navrhl a otestoval první DC motor. Vynálezce instaloval své zařízení na existující model vlaku, čímž se prokázala účinnost elektromotoru.
Praktická aplikace DPT byla nalezena B. S. Jacobiem, který ji postavil na loď, aby otočil lopatky. Zdroj současného vědce sloužil 320 galvanizačních buněk. Navzdory těžkopádnému vybavení se loď mohla plavit proti proudu a přepravovat na palubě 12 cestujících.
Teprve na konci století XIX začalo vybavovat průmyslové stroje synchronními elektromotory. Toto bylo usnadněno vědomím principu přeměny mechanické energie na elektřinu stejnosměrným motorem. To znamená, že pomocí elektromotoru v režimu generátoru se nám podařilo získat elektřinu, jejíž výroba se ukázala být výrazně levnější než náklady na výrobu elektrolytických článků. Od té doby byly elektromotory vylepšeny a začaly získávat silné pozice ve všech oblastech našeho života.
Zařízení a popis DPT
Konstrukčně je stejnosměrný motor navržen podle principu interakce magnetických polí.
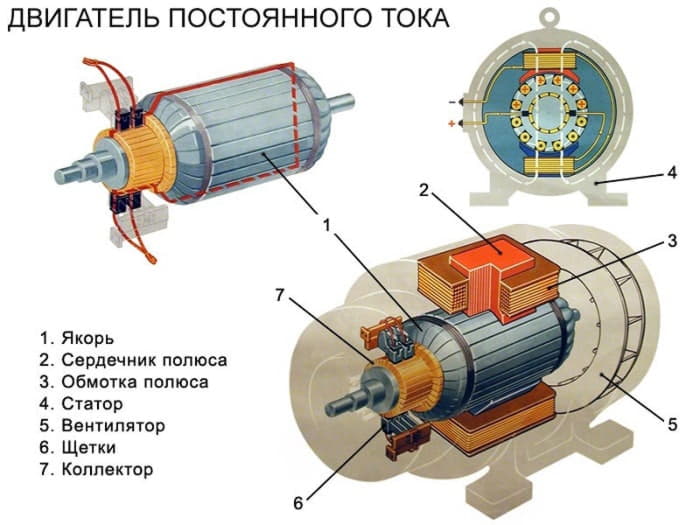
Nejjednodušší DPT se skládá z následujících hlavních uzlů:
- Dvě vinutí s jádry zapojenými do série. Tato konstrukce je umístěna na hřídeli a tvoří uzel, nazývaný rotor nebo kotva.
- Dva permanentní magnety, otočené různými póly na vinutí. Provádí úkol statického statoru.
- Sběrač - dva polokruhové, izolované desky umístěné na hřídeli DPT.
- Dva pevné kontaktní prvky (kartáče) určené k přenosu elektrického proudu skrz kolektor do budících vinutí.
Výše uvedený příklad je spíše pracovním modelem kolektorového motoru. V praxi taková zařízení neplatí. Faktem je, že takový motor je příliš malý. Funguje trhaně, zejména při připojování mechanického zatížení.
Stator (induktor)
V modelech výkonných moderních stejnosměrných motorů se používají statory, které jsou také induktory ve formě cívek navinutých na jádrech. Když je elektrický obvod uzavřen, dochází k tvorbě magnetických siločar v důsledku výsledné elektromagnetické indukce.
Pro napájení vinutí DPT lze použít různá schémata zapojení:
- s nezávislou excitací vinutí;
- spojení paralelně s vinutími kotvy;
- varianty se sekvenční excitací rotorových a statorových cívek;
- smíšené spojení.
Schémata zapojení mohou být jasně vidět na obrázku 2.
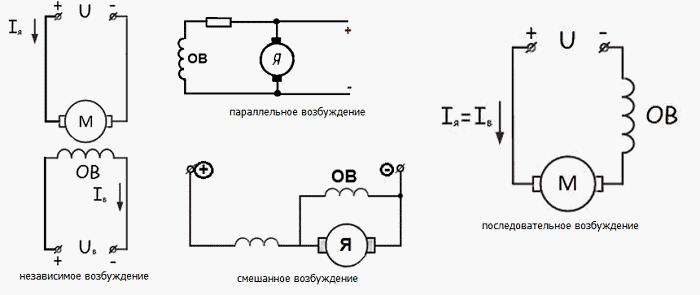
Každá metoda má své výhody a nevýhody. Často je způsob připojení dán podmínkami, za kterých se očekává provoz stejnosměrného motoru. Zejména pokud je požadováno snížení oblouku kolektoru, pak použijte paralelní spojení. Pro zvýšení točivého momentu je lepší použít obvody se sériovým zapojením vinutí. Přítomnost vysokých startovacích proudů vytváří zvýšený elektrický výkon v okamžiku spuštění motoru. Tento způsob je vhodný pro stejnosměrný motor, který intenzivně pracuje v krátkodobém režimu, například pro spouštěč. V tomto způsobu provozu nemají části elektromotoru čas přehřátí, takže jejich opotřebení je zanedbatelné.
Rotor (kotva)
V příkladu primitivního elektromotoru popsaného výše, rotor sestává z dvoupramenné kotvy na jednom vinutí, s odlišnými póly. Konstrukce umožňuje otáčení hřídele motoru.
V popsaném zařízení je významná nevýhoda: když zastavíte rotaci kotvy, její vinutí zabírají stabilně. Pro opětovné spuštění elektromotoru je nutné předat určitý moment na hřídel.
Tato vážná nevýhoda je zbavena kotvy se třemi a velkým počtem vinutí. Obr. 3 znázorňuje obrázek trojvinucího rotoru a Obr. 4 - kotva s velkým počtem vinutí.

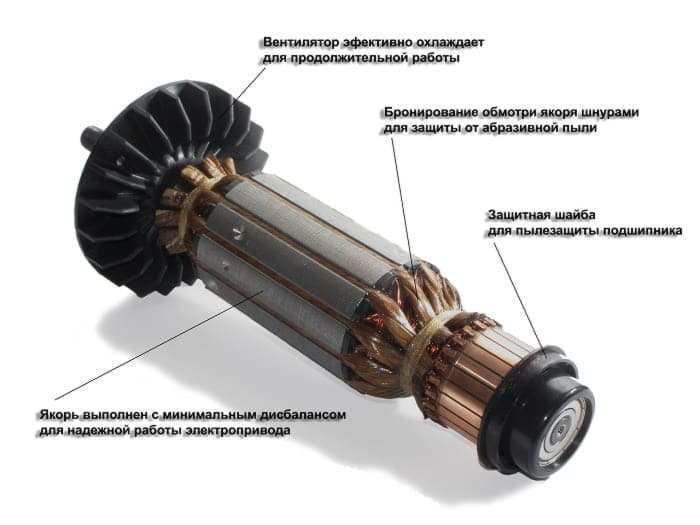
Takové rotory se často vyskytují v malých elektromotorech s malým výkonem.
Pro konstrukci výkonných trakčních motorů a za účelem zvýšení stability kmitočtu otáčení se používá kotva s velkým počtem vinutí. Schéma takového motoru je znázorněno na obr. 5. Obr.
Sběratel
Je-li k pinům vinutí rotoru připojeno stejnosměrné napájení, bude kotva trvat půl otáčky a zastaví se. Pro pokračování procesu otáčení je nutné změnit polaritu vstupního proudu. Zařízení, které plní funkci spínacího proudu pro změnu polarity na svorkách vinutí, se nazývá kolektor.
Nejjednodušší kolektor se skládá ze dvou izolovaných půlkruhových desek. Každý z nich v určitém bodě kontaktu s kartáčem, který uvolňuje napětí. Jedna lamela je vždy napojena na plus a druhá na minus. Když se hřídel otočí o 180 °, desky kolektorů vymění místa, v důsledku čehož dojde k nové komutaci se změnou polarity.
Stejný princip spínacích výkonových vinutí se používá ve všech kolektorech, včetně zařízení s velkým počtem lamel (pár pro každé vinutí). Sběrač tak zajišťuje spínání potřebné pro plynulé otáčení rotoru.
V moderních konstrukcích kolektorů jsou lamely uspořádány v kruhu tak, že každá deska odpovídajícího páru je na diametrálně protilehlé straně. V důsledku změny polohy hřídele se kotevní řetěz zapne.
Princip činnosti
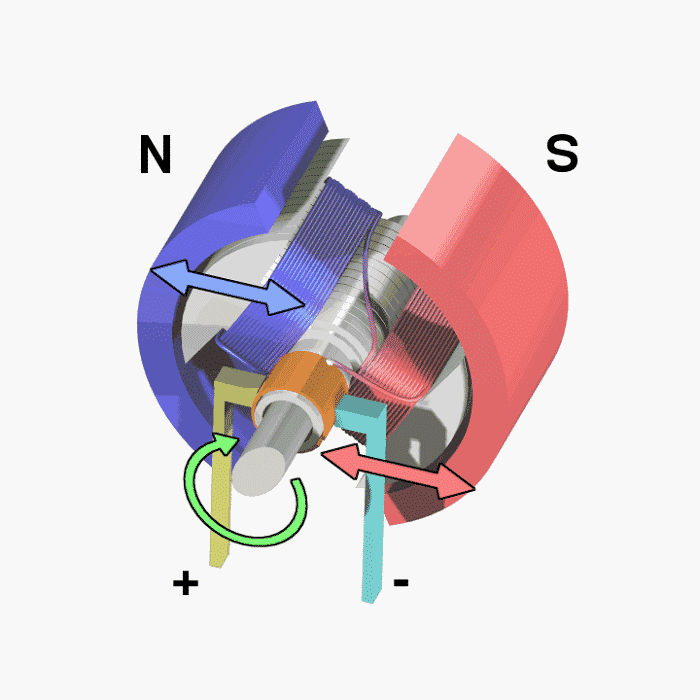
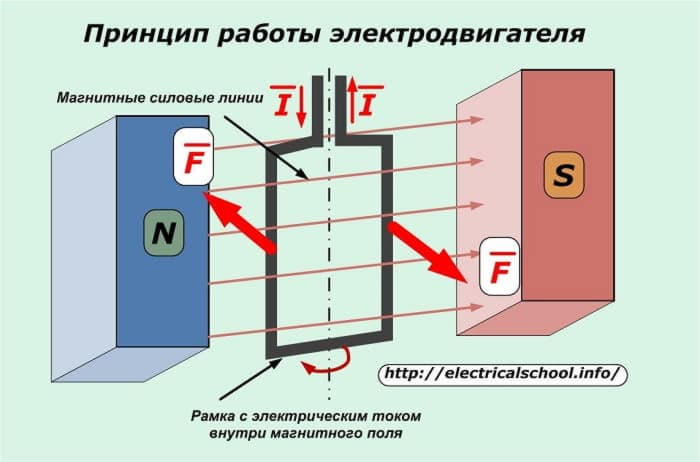
Dokonce i ze školy si pamatujeme, že živý vodič, umístěný mezi póly magnetu, má tlačnou sílu. To se děje proto, že se kolem drátu podél jeho celé délky vytváří magnetické pole. Výsledkem interakce magnetických polí je výsledná „amperovská“ síla:
F = B × I × L, kde B znamená velikost magnetické indukce pole, I je proud, L je délka vodiče.
Vektor Amperova je vždy kolmý na čáry magnetického toku mezi póly. Schematicky je princip činnosti znázorněn na Obr. 6
Pokud namísto přímého vodiče vezmeme obrysový rám a připojíme jej ke zdroji proudu, otočí se o 180 ° a zastaví se v takové poloze, že výsledná síla bude rovna 0. Pokusme se zatlačit rám. Vrací se do výchozí pozice.
Změňte polaritu proudu a zkuste to znovu: rám udělal další půl otáčky. Je logické předpokládat, že je nutné změnit směr proudu pokaždé, když odpovídající otáčky vinutí procházejí body změny pólů magnetů. Pro tento účel byl kolektor vytvořen.
Schematicky si můžete představit každé vinutí kotvy ve formě samostatného obrysu. Pokud existuje několik vinutí, pak se v každém okamžiku přiblíží k magnetu statoru a je ovlivněn vztlakovou silou. Tím je udržována kontinuální rotace kotvy.
Typy DPT
Stávající DC motory mohou být klasifikovány podle dvou hlavních rysů: přítomností nebo nepřítomností sestavy kartáčového kolektoru v konstrukci motoru a typem magnetického systému statoru.
Zvažte hlavní rozdíly.
Přítomností jednotky sběrače kartáčů
Stejnosměrné motory pro spínací vinutí, které používají uzly kolektorových kolektorů, se nazývají kolektorové. Pokrývají širokou škálu modelů elektromotorů. Jsou zde motory, ve kterých se používá až 8 uzlů sběrače.
Funkce rotoru mohou provádět permanentní magnet a proud z elektrické sítě je napájen přímo do vinutí statoru. V tomto provedení není potřeba kolektor a problémy spojené se spínáním jsou řešeny elektronicky.
U takových bezkartáčových motorů je eliminována jedna z nevýhod - jiskření, které vede k intenzivnímu opotřebení kolektorových desek a kartáčů. Kromě toho jsou jednodušší udržovat a udržovat všechny užitečné vlastnosti DCF: snadnost řízení spojená s řízením rychlosti, vysokou účinností a dalšími ukazateli. Střídavé motory se nazývají ventilové motory.
Podle typu konstrukce magnetického systému statoru
V konstrukci synchronních motorů jsou k dispozici modely s permanentními magnety a stejnosměrnými obvody s budícími vinutími. Elektromotory řady, ve kterých se používají statory s budícím proudem z vinutí, jsou poměrně běžné. Zajišťují stabilní otáčky hřídele, vysoký jmenovitý mechanický výkon.
Metody připojení vinutí statoru byly diskutovány výše. Opět zdůrazňujeme, že elektrické a trakční charakteristiky stejnosměrných motorů závisí na volbě schématu zapojení. Liší se v sériových vinutích a ve svitcích s paralelním buzením.
Řízení
Není těžké pochopit, že pokud se změní polarita napětí, změní se také směr otáčení kotvy. To usnadňuje ovládání motoru manipulací s polaritou kartáčů.
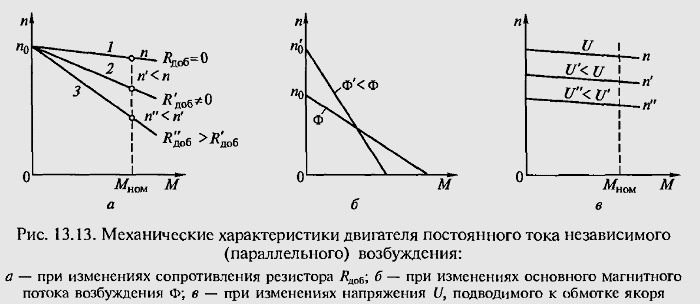
Mechanická charakteristika
Uvažujme graf frekvence versus moment síly na hřídeli. Vidíme přímku s negativním svahem. To přímo vyjadřuje mechanické vlastnosti stejnosměrného motoru. Pro svou konstrukci zvolte určité pevné napětí, které se spočítá k napájení vinutí rotoru.
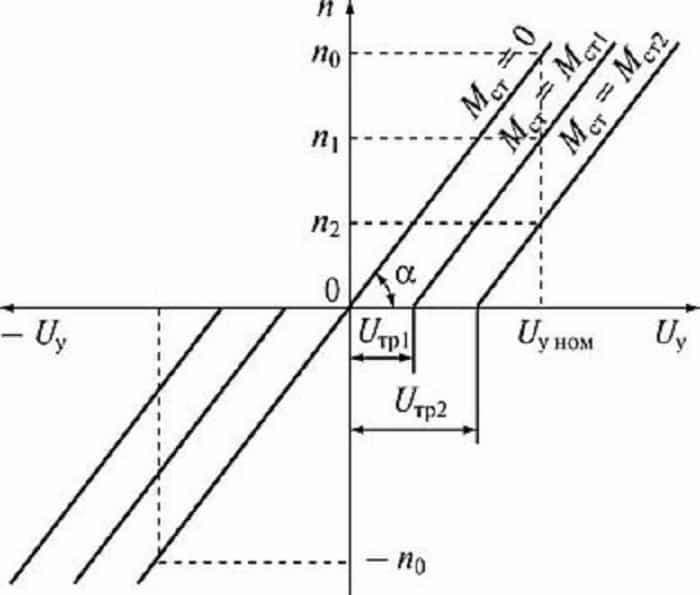
Kontrolní charakteristika
Stejný přímý, ale s pozitivním sklonem, je grafem frekvence otáčení kotvy od napájecího napětí. Toto je regulační charakteristika synchronního motoru.
Konstrukce specifikovaného harmonogramu je prováděna v určitém momentu vyvinutého DPT.
Vzhledem k linearitě charakteristik je řízení stejnosměrných motorů zjednodušeno. Protože síla F je úměrná proudu, změnou jeho hodnoty, například proměnlivým odporem, je možné regulovat parametry motoru.
Nastavení otáček rotoru lze snadno provést změnou napětí. U kolektorových motorů používajících startovací odpory dosahují plynulého zvyšování rychlosti, což je důležité zejména u trakčních motorů. Je to také jedna z účinných brzdných metod. Navíc v režimu zpomalení generuje synchronní elektromotor elektrickou energii, kterou lze vrátit do sítě.
Oblasti použití
Výčet všech oblastí použití elektromotorů může být nekonečně dlouhý. Například jen několik z nich:
- elektrické nářadí pro domácnost a průmysl;
- automobilový průmysl - okna, ventilátory a další automatika;
- Tramvaje, trolejbusy, elektromobily, jeřáby a další mechanismy, pro které jsou důležité vysoké trakční vlastnosti.
Výhody a nevýhody
Mezi výhody patří:
- Lineární závislost vlastností stejnosměrných elektromotorů (přímky) zjednodušuje řízení;
- Snadno nastavitelná rychlost;
- dobré výchozí vlastnosti;
- kompaktní velikost.
V asynchronních motorech, které jsou střídavými motory, je velmi obtížné dosáhnout takových charakteristik.
Nevýhody:
- omezený sběratel zdrojů a kartáče;
- další ztráta času na preventivní údržbu spojenou s údržbou uzlů sběrných kartáčů;
- vzhledem k tomu, že používáme sítě se střídavým napětím, je nutné proud opravit;
- výrobních kotev.
Podle uvedených parametrů se jako vítěze ukázaly modely asynchronních motorů. V mnoha případech je však použití stejnosměrného motoru jedinou možnou možností, která nevyžaduje složitost elektrického obvodu.