
Pomozte vývoji webu a sdílení článku s přáteli!
Vzhledem k tomu, že dodávka elektřiny je tradičně prováděna dodávkou střídavého proudu pro spotřebitele, je zřejmé, že je potřeba vytvořit elektrické stroje pracující na dodávané elektřině. Zejména se střídavý proud aktivně používá v asynchronních elektromotorech, které jsou široce používány v mnoha oblastech lidské činnosti. Zvláště pozoruhodný je asynchronní motor s rotorem klece veverky, který z několika důvodů zaujal v aplikaci silnou pozici.
Tajemství této popularity spočívá především v jednoduchosti designu a nízkých nákladech na jeho výrobu. Elektromotory na rotorech s krátkým oběhem mají další výhody, které se naučíte z tohoto článku. A nejprve zvažte konstrukční vlastnosti tohoto typu elektromotorů.
Stavba
Každý elektromotor má dvě důležité pracovní části: rotor a stator. Jsou uzavřeny v ochranném pouzdře. Ventilátor je instalován na hřídeli rotoru pro chlazení vodičů vinutí. Toto je obecný princip struktury všech typů elektromotorů.
Konstrukce statorů uvažovaných elektromotorů se neliší od struktury těchto dílů u jiných typů elektromotorů pracujících v AC sítích. Jádra statoru, určená pro třífázové napětí, jsou uspořádána v kruhu pod úhlem 120 °. Jsou instalovány na vinutí izolovaného měděného drátu určitého průřezu, který je spojen trojúhelníkem nebo hvězdou. Konstrukce magnetického obvodu statoru je pevně namontována na stěnách válcového tělesa.
Konstrukce elektromotoru je zřejmá z obr. 1. Poznamenejte si design vinutí bez jádra ve zkratovaném rotoru.
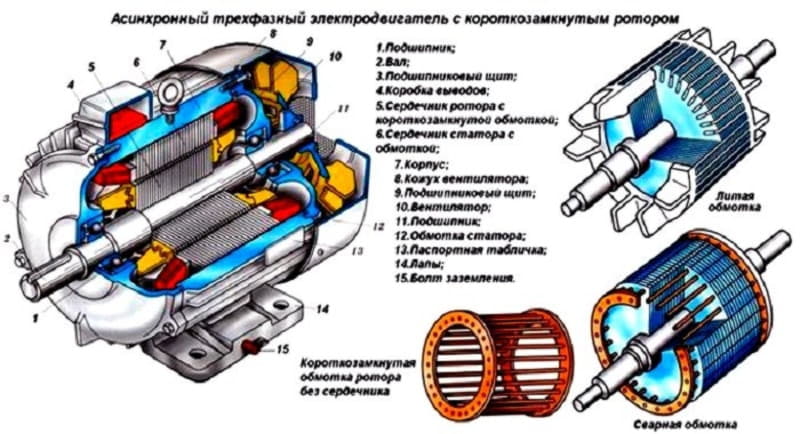
Rotor je mírně odlišný. Konstrukce jeho vinutí je velmi podobná kleci veverky. Skládá se z hliníkových tyčí, jejichž konce uzavírají zkratovací kroužky. U motorů s vysokým výkonem lze použití měděných tyčí považovat za zkratová vinutí rotoru. Tento kov má nízký odpor, ale je dražší než hliník. Kromě toho se měď taví rychleji, což není žádoucí, protože vířivé proudy mohou ohřívat jádro silně.
Konstrukčně jsou tyče umístěny na horní části jader rotoru, které se skládají z transformátorové oceli. Při výrobě rotorů jsou jádra uložena na hřídeli a vodiče vinutí přitlačují (nalévají) do drážek magnetického obvodu. Není třeba izolovat drážky jádra. Obrázek 2 ukazuje fotografii rotoru se zkratovými vinutími.

Magnetické desky takových rotorů nevyžadují izolaci povrchů lakem. Jsou velmi snadno vyráběné, což snižuje náklady na asynchronní elektromotory, které představují až 90% celkového počtu elektromotorů.
Rotor se otáčí asynchronně uvnitř statoru. Mezi těmito částmi se nastavuje minimální vzdálenost ve formě vzduchových mezer. Optimální vůle je mezi 0, 5 mm a 2 mm.
V závislosti na počtu použitých fází lze asynchronní elektromotory rozdělit do tří typů:
- jedna fáze;
- bifázický;
- tři fáze.
Liší se počtem a umístěním vinutí statoru. Modely s třífázovými vinutími se vyznačují vysokou stabilitou při jmenovitém zatížení. Mají nejlepší výchozí vlastnosti. Tyto elektromotory často používají jednoduché spouštěcí schéma.
Dvoufázové motory mají dvě kolmo uspořádaná statorová vinutí, z nichž každé přijímá střídavý proud. Často se používají v jednofázových sítích - jedno vinutí je připojeno přímo k fázi a k napájení druhého slouží kondenzátor fázového posunu. Bez této části se otáčení hřídele asynchronního elektromotoru nezačne samostatně. Vzhledem k tomu, že kondenzátor je nedílnou součástí dvoufázového elektromotoru, nazývají se tyto motory také motory s kondenzátory.
Při konstrukci jednofázového elektromotoru se používá pouze jedno pracovní vinutí. Pro spuštění rotace rotoru je použita indukční spínací cívka, která je krátce připojena k síti přes kondenzátor nebo zkratovaná. Tyto motory s nízkým výkonem se používají jako elektrické pohony pro některé domácí spotřebiče.
Princip činnosti
Činnost asynchronního motoru se provádí na základě třífázové proudové vlastnosti, která je schopna produkovat rotující magnetické pole ve vinutí statoru. U uvažovaných elektromotorů je synchronní frekvence otáčení elektromagnetického pole přímo úměrná charakteristickému kmitočtu střídavého proudu.
Existuje nepřímo úměrná závislost rychlosti otáčení na počtu párů pólů ve vinutí statoru. Vzhledem k tomu, že fázový posun je 60 °, může být závislost rychlosti rotoru (v ot / min) vyjádřena vzorcem:
n 1 = ( f 1 * 60) / p, kde n1 je synchronní frekvence, f1 je frekvence střídavého proudu a p je počet párů pólů.
V důsledku magnetické indukce na jádru rotoru v něm vznikne emf, který zase způsobí vznik elektrického proudu v uzavřeném vodiči. Vznikne silová síla, při které se uzavřená smyčka začne otáčet po magnetickém poli. Ve jmenovitém režimu provozu otáčky rotoru mírně zaostávají za rychlostí otáčení magnetického pole vytvořeného ve statoru. Když se frekvence shodují, magnetický tok se zastaví, proud zmizí ve vinutí rotoru, v důsledku čehož se síla zastaví. Jakmile rychlost otáčení hřídele zaostává, střídavé proudy magnetických polí obnoví působení ampérové síly.
Rozdíl ve frekvenci rotace magnetických polí se nazývá skluzová frekvence: n s = n 1 –n 2 a relativní hodnota s, která charakterizuje zpoždění, se nazývá skluz.
s = 100% * ( n s / n 1 ) = 100% * (n 1 - n 2 ) / n 1, kde n s je skluzová frekvence; n 1, n 2 - frekvence rotace magnetického pole statoru a rotoru.
Aby se snížily harmonické hodnoty EMF a vyhladily pulsace momentu momentu, otáčí se tyče s krátkými kontakty. Podívej se na pic. 2 a věnovat pozornost umístění tyčí, které působí jako vinutí rotoru, vzhledem k ose otáčení.
Skluz závisí na mechanickém zatížení hřídele motoru. U asynchronních elektromotorů dochází ke změně parametrů prokluzu v rozsahu od 0 do 1. Navíc v režimu volnoběhu rotor, který získal hybnost, téměř nevykazuje aktivní odpor. S se blíží nule.
Zvýšení zatížení přispívá ke zvýšení skluzu, který může dosáhnout jednotky, v době zastavení motoru v důsledku přetížení. Takový stav je ekvivalentní zkratovému režimu a může zařízení vypnout.
Relativní velikost zpoždění odpovídající jmenovitému zatížení elektrického stroje se nazývá jmenovitý skluz. U elektromotorů s nízkým výkonem a motorů s průměrným výkonem se tento ukazatel mění v malém rozsahu - od 8% do 2%. Když je rotor motoru v klidu, skluz má tendenci k 0 a při volnoběhu se blíží 100%.
Během startu elektromotoru jsou jeho vinutí pod zatížením, což vede k prudkému nárůstu zapínacích proudů. Po dosažení jmenovitého výkonu obnovují elektromotory se zkratovanými cívkami nezávisle jmenovitou frekvenci rotoru.
Věnujte pozornost křivce točivého momentu na obr. 3

Se zvyšujícím se krouticím momentem se koeficient s mění z 1 na 0 (viz část „oblast motoru“). Také zvyšuje rychlost otáčení hřídele. Překročí-li rychlost otáčení hřídele jmenovitou frekvenci, pak točivý moment bude záporný a motor přejde do režimu generování (segment „generující oblast“). V tomto režimu bude mít rotor magnetický odpor, který povede k brzdění motoru. Oscilační proces se bude opakovat, dokud se kroutící moment nestabilizuje a skluz se blíží jmenovité hodnotě.
Výhody a nevýhody
Široké využití asynchronních motorů s rotory s krátkým oběhem je díky jejich nesporným výhodám:
- stabilita práce při optimálním zatížení;
- vysoká spolehlivost při provozu;
- nízké provozní náklady;
- trvanlivost provozu bez údržby;
- relativně vysoká účinnost;
- nízké náklady ve srovnání s modely na bázi fázových rotorů as jinými typy elektromotorů.
Mezi nedostatky lze konstatovat:
- vysoké počáteční proudy;
- citlivost na poklesy napětí;
- nízký poměr skluzu;
- potřebu používat zařízení, jako jsou měniče kmitočtu, startovací odpory atd., pro zlepšení vlastností elektromotoru;
- ED s rotorem klece veverky potřebují další spínací řídicí zařízení v případech, kdy je potřeba rychlost nastavit.
Elektromotory tohoto typu mají slušné mechanické vlastnosti. Navzdory nedostatkům vedou z hlediska jejich uplatňování.
Hlavní technické vlastnosti
V závislosti na třídě motoru se liší jeho technické vlastnosti. V rámci tohoto článku se neklade úloha snižování parametrů všech stávajících tříd motorů. Zaměříme se na popis hlavních technických charakteristik elektromotorů třídy 56 A2 - 80 B2.
V této malé mezeře na modelové řadě elektromotorů s rotory s krátkým oběhem lze poznamenat:
Rozsah výkonu od 0, 18 kW (třída 56 A2) do 2, 2 kW (třída 80 B2).
Proud při maximálním napětí je od 0, 55 A do 5A.
Účinnost od 66% do 83%.
Rychlost otáčení hřídele pro všechny modely ze specifikovaného rozsahu je 3000 ot / min.
Specifikace konkrétního motoru jsou uvedeny v pasu.
Připojení
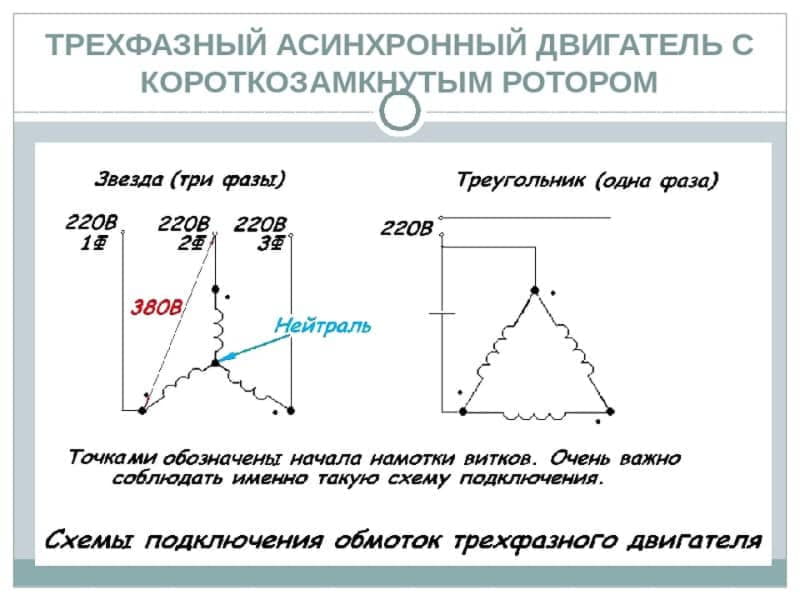
Vinutí statoru třífázového ADKR lze připojit podle schématu „trojúhelník“ nebo „hvězda“. Hvězdička zároveň vyžaduje vyšší napětí než trojúhelník.
Všimněte si, že elektromotor připojený různými způsoby ke stejné síti spotřebuje jiný výkon. Proto nemůžete připojit elektromotor, určený pro schéma "hvězdy" na principu trojúhelníku. Aby se však snížily počáteční proudy, je možné přepínat na dobu spuštění kontaktů hvězdy v trojúhelníku, ale pak se také sníží počáteční moment.
Schémata zapojení jsou zřejmé z obrázku 4.
Pro připojení třífázového elektromotoru k jednofázovému proudu se používají fázově posunuté prvky: kondenzátory, odpory. Příklady takových spojení jsou znázorněny na obrázku 5. Můžete použít jak hvězdu, tak trojúhelník.
Pro řízení činnosti motoru jsou k elektrickému obvodu statoru připojena další zařízení.