
- Obecné informace, zařízení, rozsah
- Princip činnosti
- Rozdíly kolektoru a střídavého motoru
- Jak začít bezkartáčový motor?
- Řízení střídavého motoru
- Třífázový bezkartáčový DC motor
- Výhody a nevýhody
Pomozte vývoji webu a sdílení článku s přáteli!
Zařízení pro domácnost a zdravotnictví, aeromodelling, zavírače trubek plynovodů a ropovodů - to není úplný seznam aplikací bezkartáčových stejnosměrných motorů. Podívejme se na strukturu a provoz těchto elektromechanických pohonů, abychom lépe porozuměli jejich výhodám a nevýhodám.
Obecné informace, zařízení, rozsah
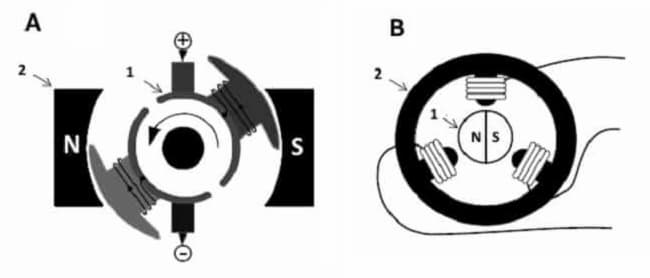
Jedním z důvodů zájmu o databázi je zvýšená potřeba vysokorychlostních mikromotorů s přesným polohováním. Vnitřní struktura takových pohonů je znázorněna na obr. 2. Obr.
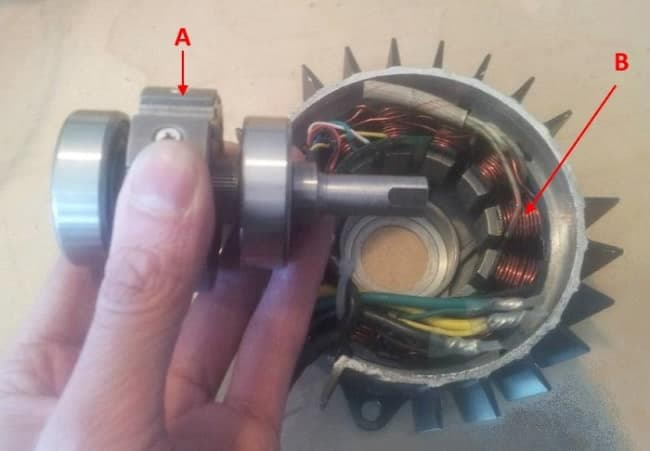
Jak vidíte, design je rotor (kotva) a stator, první má permanentní magnet (nebo několik magnetů uspořádaných v určitém pořadí) a druhý je vybaven cívkami (B) pro vytvoření magnetického pole.
Je pozoruhodné, že tyto elektromagnetické mechanismy mohou být buď s vnitřní kotvou (tento typ konstrukce je vidět na obr. 2), nebo externě (viz obr. 3).
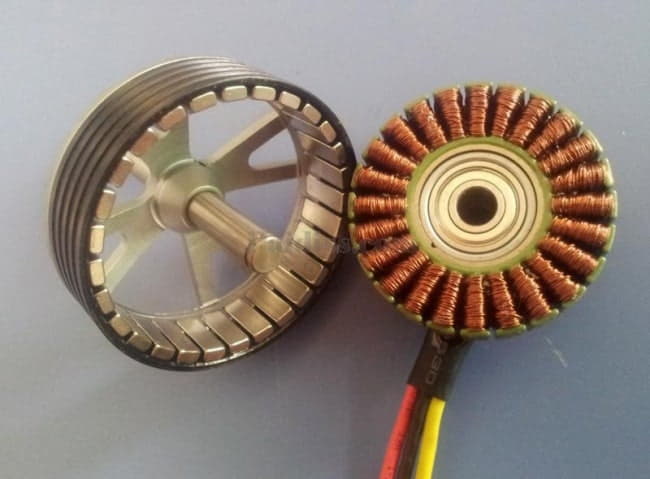
Každá z těchto struktur má tedy specifický rozsah. Zařízení s vnitřní kotvou mají vysokou rychlost otáčení, proto se používají v chladicích systémech, jako elektrárny pro drony atd. Externí rotorové pohony se používají tam, kde je požadováno přesné polohování a odolnost proti přetížení momentem (robotika, zdravotnická zařízení, CNC stroje atd.).
Princip činnosti
Na rozdíl od jiných pohonů, například asynchronního střídavého stroje, vyžaduje DB speciální regulátor, který obsahuje vinutí, takže vektory magnetického pole armatury a statoru jsou vzájemně kolmé. Ve skutečnosti ovladač zařízení reguluje točivý moment působící na kotvu databáze. Tento proces je jasně znázorněn na obr. 4. Obr.
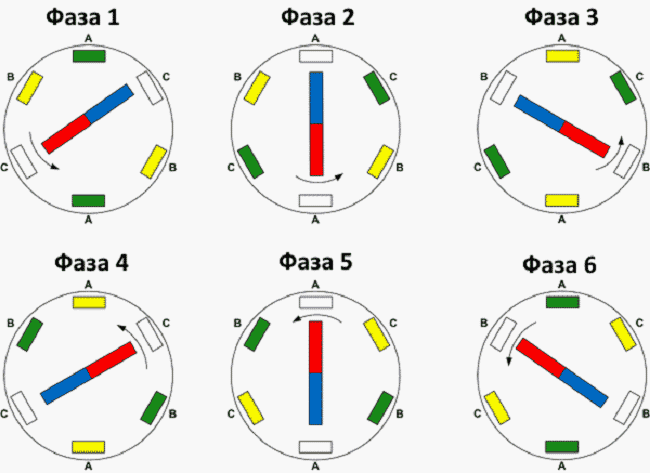
Jak je vidět, pro každé posunutí kotvy je nutné provést určitou komutaci ve vinutí statoru bezkartáčového motoru. Takový princip operace neumožňuje plynule ovládat rotaci, ale dává příležitost rychle získat hybnost.
Rozdíly kolektoru a střídavého motoru
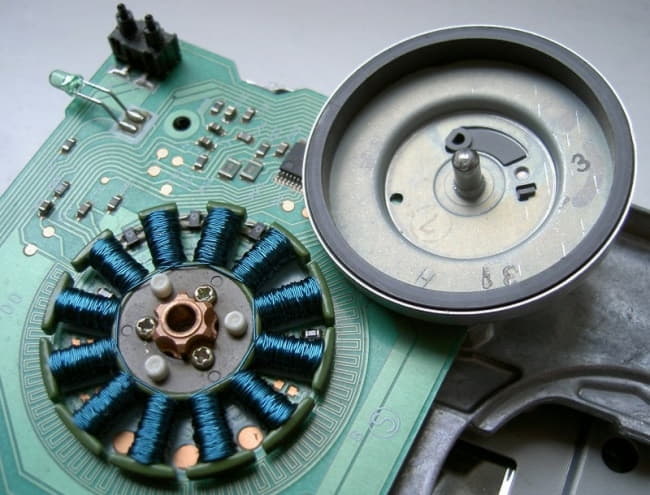
Pohon kolektorového typu se liší od databáze jak v konstrukčních prvcích (viz obr. 5.), tak v principu provozu.
Zvažte rozdíly v návrhu. Z obr. 5 je vidět, že rotor (1 na obr. 5) motoru kolektorového typu má na rozdíl od bezkartáčového motoru cívky, které mají jednoduché schéma navíjení, a na statoru (2 na obr. 5) jsou instalovány permanentní magnety (obvykle dva). ). Kromě toho je na hřídeli, ke kterému jsou připojeny kartáče, instalován kolektor, který dodává napětí do vinutí kotvy.
Stručně o principu kolektorových strojů. Když je napětí aplikováno na jednu z cívek, je excitováno a vzniká magnetické pole. Interaguje s permanentními magnety, což způsobuje otáčení armatury a kolektoru. Výsledkem je napájení druhého vinutí a cyklus se opakuje.
Frekvence otáčení kotvy tohoto provedení je přímo závislá na intenzitě magnetického pole, které je zase přímo úměrné napětí. To znamená, že ke zvýšení nebo snížení rychlosti stačí zvýšit nebo snížit úroveň výživy. Pro zpětný chod je nutné přepnout polaritu. Tento způsob řízení nevyžaduje speciální regulátor, protože regulátor zdvihu může být proveden na základě proměnného odporu a konvenční spínač bude fungovat jako střídač.
Zvažovali jsme konstrukční vlastnosti bezkartáčových motorů v předchozí části. Jak si pamatujete, jejich připojení vyžaduje speciální regulátor, bez kterého prostě nebudou fungovat. Ze stejného důvodu nemohou být tyto motory použity jako generátor.
Za zmínku stojí také to, že u některých pohonů tohoto typu jsou pro efektivnější řízení polohy rotoru sledovány pomocí Hallových senzorů. To výrazně zlepšuje výkon bezkartáčových motorů, ale vede k vyšším cenám a tak drahému designu.
Jak začít bezkartáčový motor?
Pro provedení pohonů tohoto typu bude zapotřebí speciální regulátor (viz obr. 6). Bez ní je spuštění nemožné.
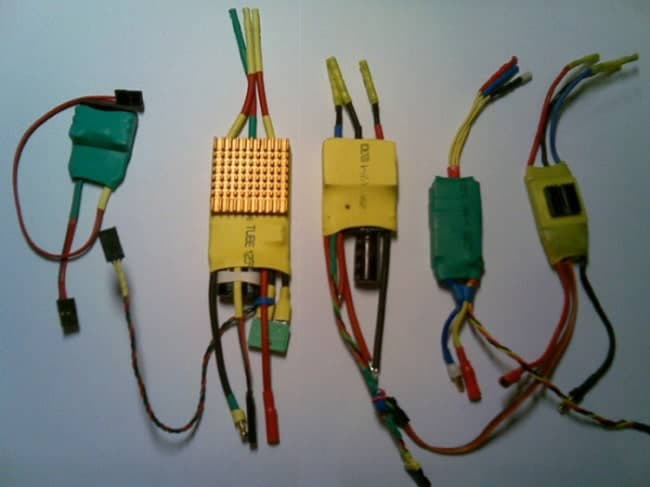
Sběr takového zařízení sám o sobě nemá smysl, je levnější a spolehlivější se připravit. Můžete si jej vyzvednout podle následujících charakteristik, které jsou typické pro ovladače kanálů pwm:
- Maximální přípustná síla proudu, tato vlastnost je dána pro normální provoz zařízení. Docela často uvádějí výrobci tento parametr v názvu modelu (například Phoenix-18). V některých případech je hodnota udávána pro režim špiček, který může regulátor několik sekund podporovat.
- Maximální hodnota standardního napětí pro nepřetržitý provoz.
- Odpor vnitřních obvodů regulátoru.
- Přípustný počet otáček je uveden v ot / min. Nad touto hodnotou regulátor neumožní zvýšení rotace (omezení je implementováno na úrovni programu). Všimněte si, že rychlost otáčení je vždy uvedena pro bipolární pohony. Pokud je pár pólů větší, hodnota by měla být vydělena jejich číslem. Například počet je 60000 ot / min, proto pro 6-magnetický motor bude rychlost otáčení 60000/3 = 20000 prm.
- Frekvence generovaných pulzů, pro většinu regulátorů, tento parametr se pohybuje v rozmezí od 7 do 8 kHz, dražší modely umožňují přeprogramovat parametr a zvýšit ho na 16 nebo 32 kHz.
První tři charakteristiky určují sílu databáze.
Řízení střídavého motoru
Jak bylo uvedeno výše, spínací řízení hnacích vinutí je řízeno elektronikou. Pro určení, kdy má být spínač proveden, řidič sleduje polohu kotvy pomocí Hallových čidel. Není-li měnič vybaven takovými detektory, je zohledněn zadní EMF, který se vyskytuje v nepřipojených cívkách statoru. Regulátor, který je v podstatě hardwarově-softwarový komplex, sleduje tyto změny a nastavuje pořadí přepínání.
Třífázový bezkartáčový DC motor
Většina databází je prováděna ve třífázovém provedení. Pro řízení takového pohonu má regulátor stejnosměrný měnič stejnosměrného napětí (viz obrázek 7).
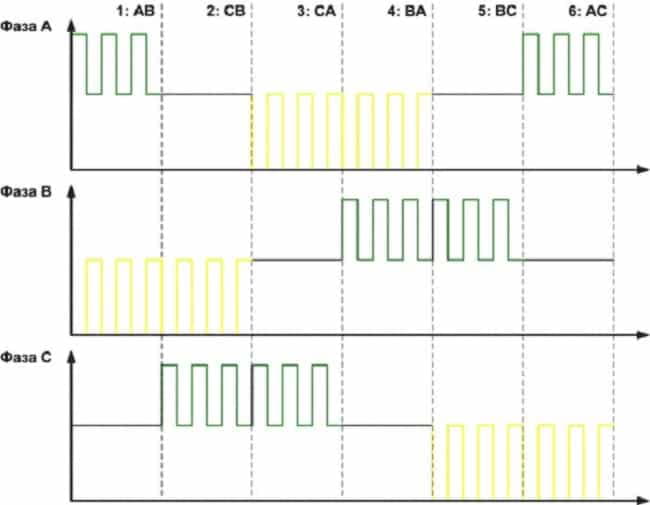
Aby bylo možno vysvětlit, jak takový ventil pracuje, je nutné společně s obr. 7 uvažovat obr. 4, kde jsou střídavě zobrazeny všechny stupně pohonu. Pojďme je napsat:
- Pozitivní impuls je přiváděn do cívek „A“, zatímco negativní impulz je přiváděn do „B“, takže se kotva bude pohybovat. Snímače detekují jeho pohyb a vydávají signál pro další komutaci.
- Cívka "A" je vypnuta a kladný impuls přejde na "C" ("B" zůstává nezměněn), pak je signál odeslán na další sadu pulzů.
- Na “C” - pozitivní, “A” - negativní.
- Dvojice "B" a "A", která přijímá pozitivní a negativní impulsy.
- Pozitivní impuls je znovu aplikován na „B“ a negativní na „C“.
- Cívky „A“ jsou zapnuty (+ je napájen) a na „C“ se opakuje negativní impuls. Pak se cyklus opakuje.
Ve zdánlivé jednoduchosti řízení je mnoho potíží. Je nutné nejen sledovat polohu kotvy pro výrobu další řady pulzů, ale také regulovat rychlost otáčení nastavením proudu v cívkách. Kromě toho byste měli zvolit nejoptimálnější parametry pro zrychlení a zpomalení. Mělo by být také pamatováno na to, že regulátor by měl být vybaven jednotkou, která umožňuje ovládat jeho provoz. Vzhled takového multifunkčního zařízení je patrný z obr. 8. Obr.

Výhody a nevýhody
Elektrický bezkartáčový motor má mnoho výhod, zejména:
- Životnost je mnohem delší než u konvenčních kolektorů.
- Vysoká účinnost.
- Rychlé nastavení maximální rychlosti otáčení.
- Je silnější než CD.
- Nepřítomnost jisker během provozu umožňuje použití měniče v podmínkách požáru.
- Není nutné žádné další chlazení.
- Snadná obsluha.
Nyní uvažujme proti. Významnou nevýhodou, která omezuje použití databáze, je jejich relativně vysoká cena (s přihlédnutím k ceně řidiče). Mezi nepříjemnosti by mělo být přičítáno neschopnosti používat databázi bez řidiče, a to i pro krátkodobé začlenění, například pro testování výkonu. Opravte problém, zejména pokud je potřeba převinout zpět.